Rofarm
로팜
Rofarm
로팜
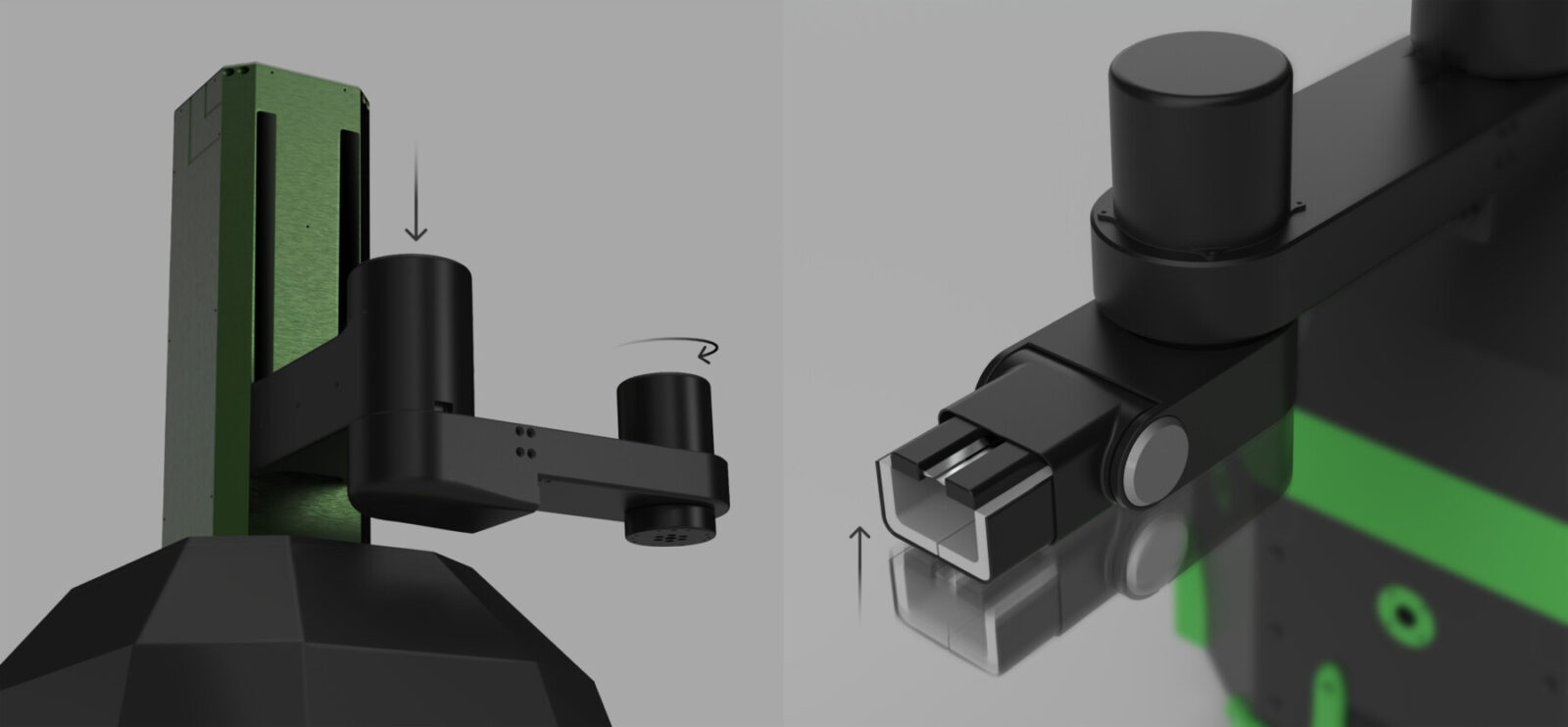
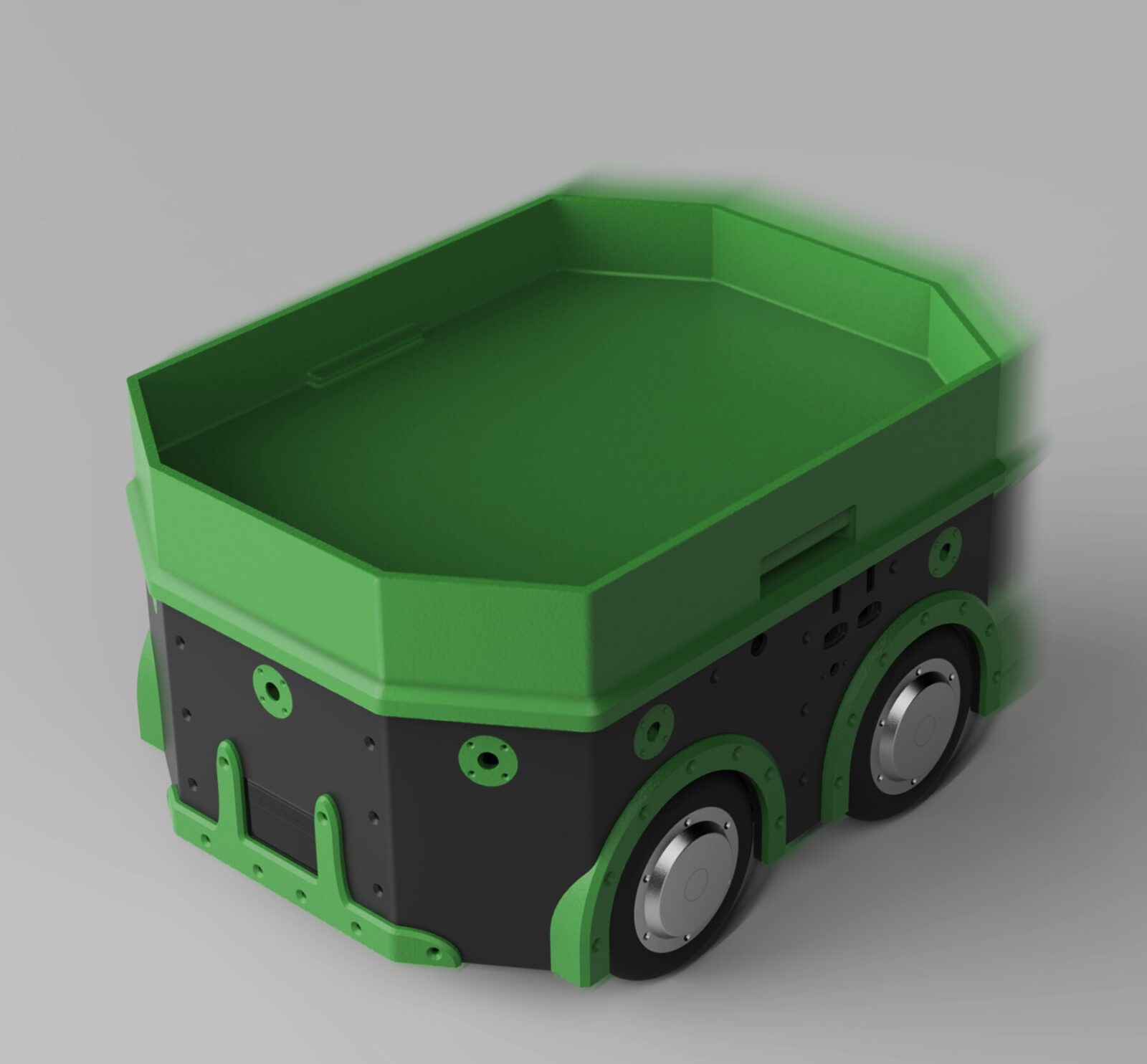
실외 과수 농장과 실내 스마트팜 환경에서 수확 및 운반 지원을 위한 자율주행 모빌리티
노동 인력의 부족으로 인해 적기 영농의 어려움을 겪고 있으며 노동 인건비 증가로 인한 경제성을 이유로 수확을 포기하는 사례가 빈번히 나타나고 있습니다. 노동 인력을 최소화하기 위한 노동 보조 또는 지원을 목적으로 기존의 농업 종사자의 사용성을 분석하여 사용자 친화적인 모빌리티와 로봇 Rofarm을 제안합니다. 디자이너와 엔지니어가 협력하여 로봇의 외관 디자인뿐만 아니라 모빌리티의 운용성, 로봇 암의 움직임을 고려했습니다. 또한 로봇의 제작비를 낮추는 목적으로 3D 프린트를 활용하였고 후가공이 필요없도록 설계하였습니다.
Due to the shortage of labor force, timely farming is experiencing difficulties, and farmers are giving up harvesting due to increased labor costs. For labor assistance or reduction to minimize the labor force, we propose user-friendly mobility Rofarm. Designer and engineers collaborated to consider an exterior design of the robot and the operability of mobility and the movement of the robot arm.